Faire du jogging avec un robot
Voir le Robotics_Jogging.project exemple de projet dans le répertoire d'installation de CODESYS en dessous de ..\CODESYS SoftMotion\Examples.
Cet exemple montre comment déplacer un groupe d'axes avec la SMC_GroupJog2 PU.
Il est recommandé d'installer le CODESYS Depictor pour cet exemple (la version démo gratuite est suffisante). Alternativement, vous pouvez également supprimer les parties de code correspondantes de l'exemple afin d'utiliser l'exemple sans Depictor.
Application
Afin de démontrer le cas le plus général possible, l'exemple a les fonctions suivantes :
Utilisation d'un robot à singularités (robot articulé 6 axes). L'exemple montre que vous pouvez déplacer le robot à travers des singularités dans ACS, puis continuer le jogging de manière cartésienne dans une configuration différente.
Décalage et rotation du système de coordonnées machine (MCS) du robot par rapport au système de coordonnées mondial (WCS). De cette façon, vous pouvez voir comment le jogging diffère dans MCS et WCS.
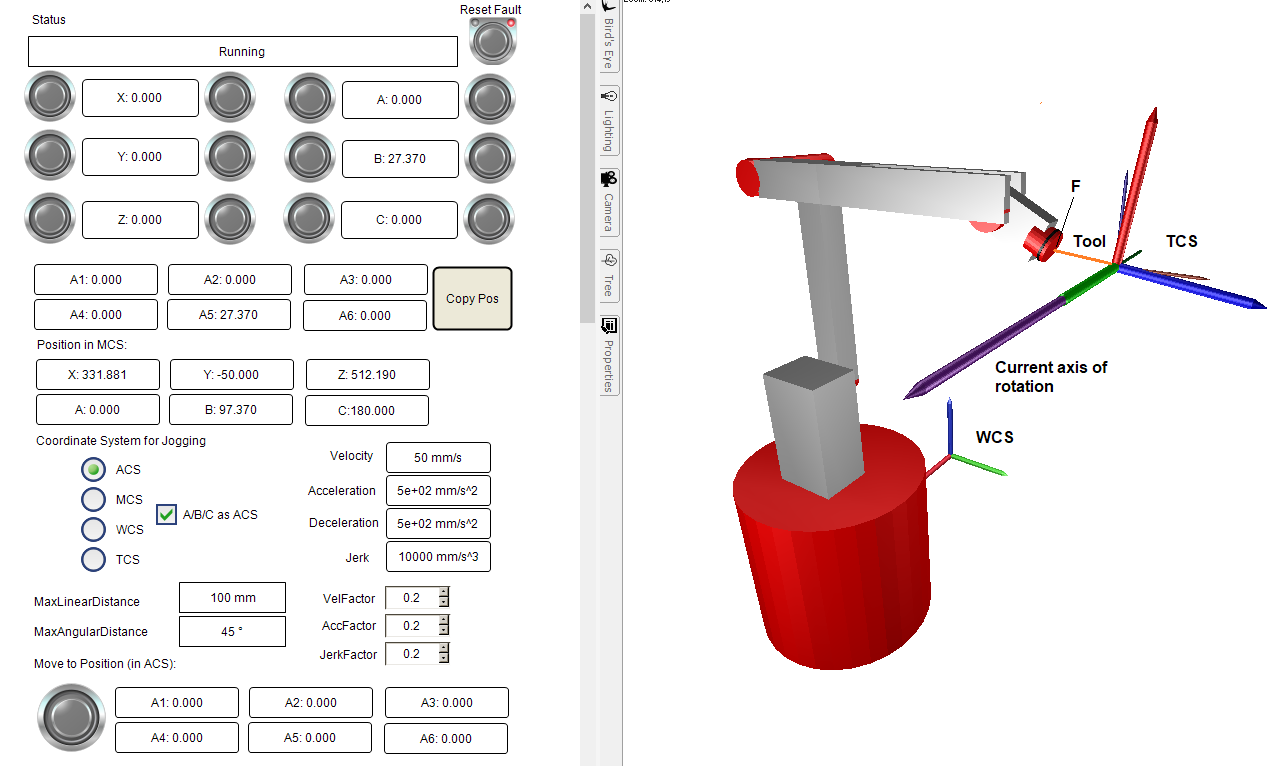
Configuration d'un outil décalé et tourné par rapport à la bride (F). Dans la figure ci-dessous, vous pouvez voir l'outil et le déplacement et la rotation du TCS par rapport à la bride (F).
Un axe linéaire supplémentaire
Add0et un axe rotatif supplémentaireAdd1.
Structure de la demande
Programme principal
Le programme principal
PLC_PRGse compose d'une machine d'état, quiActive le groupe d'axes (état 0)
Configure l'outil (état 5)
Configure le MCS (état 6)
Démarre le jogging (état 10)
Dans l'état 20, les erreurs de jogging sont gérées et les commandes de mouvement sont acceptées (Déplacer vers un poste basculer dans la visualisation).
Les autres états sont utilisés pour effectuer le mouvement (60, 70) et pour gérer et acquitter les erreurs (900, 1000).
Selon la machine à états, tous les POU robotiques et les
GroupJog2Le programme est appelé de manière cyclique et certains calculs sont effectués pour l'affichage 3D dans Depictor.
Programme GroupJog2
Ce programme contient une machine d'état avec les étapes suivantes :
Dans l'état 10, les entrées de SMC_GroupJog2 sont définies et la configuration des axes du robot est lue (SMC_GroupReadActualPosition). Cette configuration se fait à l'état 20 dans le groupe d'axes (SMC_SetKinConfiguration).
Dans l'état 30, le système réagit aux erreurs pendant le jogging, ainsi qu'aux modifications des paramètres du jogging (par exemple, à un système de coordonnées modifié). S'il y a un changement, alors le système repasse à l'état 10.
L'état 50 est entré sur un front descendant de l'entrée Enable. Le jogging est arrêté par MC_GroupHalt.
Mise en service
Compilez et démarrez le programme créé. Vous pouvez utiliser la visualisation pour exécuter le robot. Vous pouvez définir tous les paramètres pertinents pour le déplacement manuel (par exemple, dans quel système de coordonnées le déplacement manuel est effectué et à quelle vitesse).
Si vous avez installé le CODESYS Depictor, il est recommandé de placer la fenêtre avec le Depictor (Scene POU) à côté de la fenêtre de visualisation.
Le Depictor représente le TCS (Tool Coordinate System) à l'avant du robot. De plus, l'axe de rotation actuel du TCS est affiché en violet. Ceci est utile pour vérifier les différents types de changement d'orientation (par exemple, tester le ABC_as_ACS l'option et la SDC système de coordonnées).